IR Proximity Motor Control
Infrared proximity sensors are very fun to play with. In the past we have used them to make Digital Theremins and Control Robots,
always using its proximity sensing (how far away an object is from the
sensor) as the main feature. Today, we're going on a quest to use an
infrared proximity sensor, to control the speed of a DC motor.
In this article, we will go step-by-step through the process of understanding, designing and building a system that uses an infrared proximity sensor for input, correlates that input to how far away an object is from the sensor and then drives a motor and some LEDs at distinct speeds depending upon the proximity of the object.
In this article, we will go step-by-step through the process of understanding, designing and building a system that uses an infrared proximity sensor for input, correlates that input to how far away an object is from the sensor and then drives a motor and some LEDs at distinct speeds depending upon the proximity of the object.
Purpose & Overview Of This Project
The goal of this project and article is to explain how to use an infrared proximity sensor to drive a motor. The system should be able to drive the motor at 8 different speeds (1 = slowest, 8 = fastest), likewise a representative LED bar will be added to give a second visual speed indicator. Up to 8 LEDs will be controlled to represent the 8 different levels of speed.
To make this system we will use a sharp ir distance sensor (10cm-80cm) for detecting how far away the object is, a PIC 18F4520 microcontroller to interpret the input and drive the output, a 10 LED Bar for giving a visual indication of what speed we're at, and a TIP42 + DC motor for the actual motor and power transistor to drive the motor.
PIC 18F4520
TIP42 Power BJT
IR Proximity Sensor
LED Bar
+3v Motor
20 MHz Crystal
3x 10uF Capacitors
Green LED
2x 100Ω Resistor
330Ω Resistor Network
10kΩ Resistor
Breadboard
Jumper Wire
+9v Battery Connector
Parts List Details
Luckily this project is half hardware intensive and half software intensive, so there aren't too-too many parts. Below I'll describe the most important parts in more detail.
PIC 18F4520
This microcontroller will be used for understanding the input (an analog voltage) using its built-in Analog to Digital converter and it will also be used to drive the motor output and the LED bar output.
20 MHz
A 20 MHz crystal will be used to run the microcontroller at a 20 MHz clock rate (5 MHz instruction rate).
Sharp IR Distance Sensor
This sensor is the center-piece of this article. It outputs a specific analog voltage depending upon how far away an object is from the sensor.
TIP42 Power BJT
To provide enough current to the motor we need to use a power transistor. A PWM signal from the PIC will tell the power transistor when to turn the motor on and when to turn the motor off. The PWM's duty cycle will determine the speed the motor turns.
Breadboard and Jumper Wire
We'll use a breadboard for building the circuit since everything is low frequency. Standard jumper wire will be used to connect the circuit together.
The Sharp IR Distance Sensor
There's two parts to the theory of this project that we need to cover before looking at the schematic. The first part is how the IR distance sensor works and the second part of the theory section will be looking at how the motor is controlled.
The video above demonstrates in a crude manner what the output of the IR distance sensor does when connected directly to a red LED. The LED gets brighter when the piece of paper nears the sensor because the voltage output increases. The opposite happens when the piece of paper is moved backward away from the sensor.
The Sensor's Output
Let's take a look at the datasheet's theoretical output vs. distance. The graph below shows what voltage output from the sensor you should expect when a white piece of paper is placed in front of the sensor.
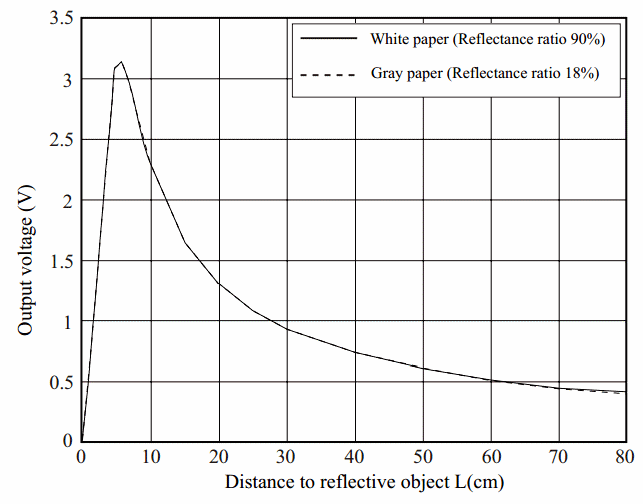
As you can see right away, the output voltage is not linear which makes things a little annoying as we won't be able to have a straight-forward correlation between voltage and distance. Sharp has made a few attempts at building an algebraic equation that you can use, check the app notes on their website for more info on those.
We won't be dynamically evaluating the sensor output in this project and converting it to distance, instead we'll use set voltages hard-coded in the software with some if statements. That means we'll need to pick 9 voltage levels at certain distances. Below you can see the 9 we chose and the 'windows' that those points form.
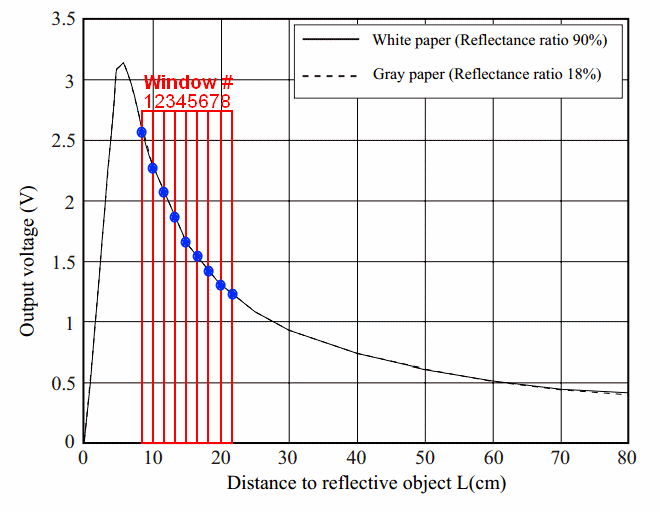
The specific distances are chosen as follows:
- Window #1 6cm-8cm
- Window #2 8cm-10cm
- Window #3 10cm-12cm
- Window #4 12cm-14cm
- Window #5 14cm-16cm
- Window #6 16cm-18cm
- Window #7 18cm-20cm
- Window #8 20cm-22cm
TIP42 Motor Control
Now, we'll take a look at how the motor will be controlled through the power transistor; the tip42. This power transistor will receive an input pulse from the microcontroller called PWM, pulse with modulation. Since the TIP42 is a PNP type transistor, any time the base pin is +0v, the transistor will be turned on and thus the motor will be turned on. To see what PWM looks like, take a look below:

The two images above show you two different PWM signals. The first signal is "on" 80% of the time. That means it is at +5v for 80% of the period of the signal. This is a weak signal and it would make the motor for this project run very slowly, if at all.
The second image shows you a signal similar to the first, but it is only on 30% of the time. It is at +0v for 70% of the period of the signal. Since this PWM signal is in an 'off' state for the majority of the time, it would make the motor for this project run much fast than the first PWM.
This might seem backwards with all the 'on' and 'off' being switched, but that is due to the fact that we're using a PNP transistor. If you want you could use an NPN transistor and everything would be opposite and therefore a little more normal.
Schematic Overview
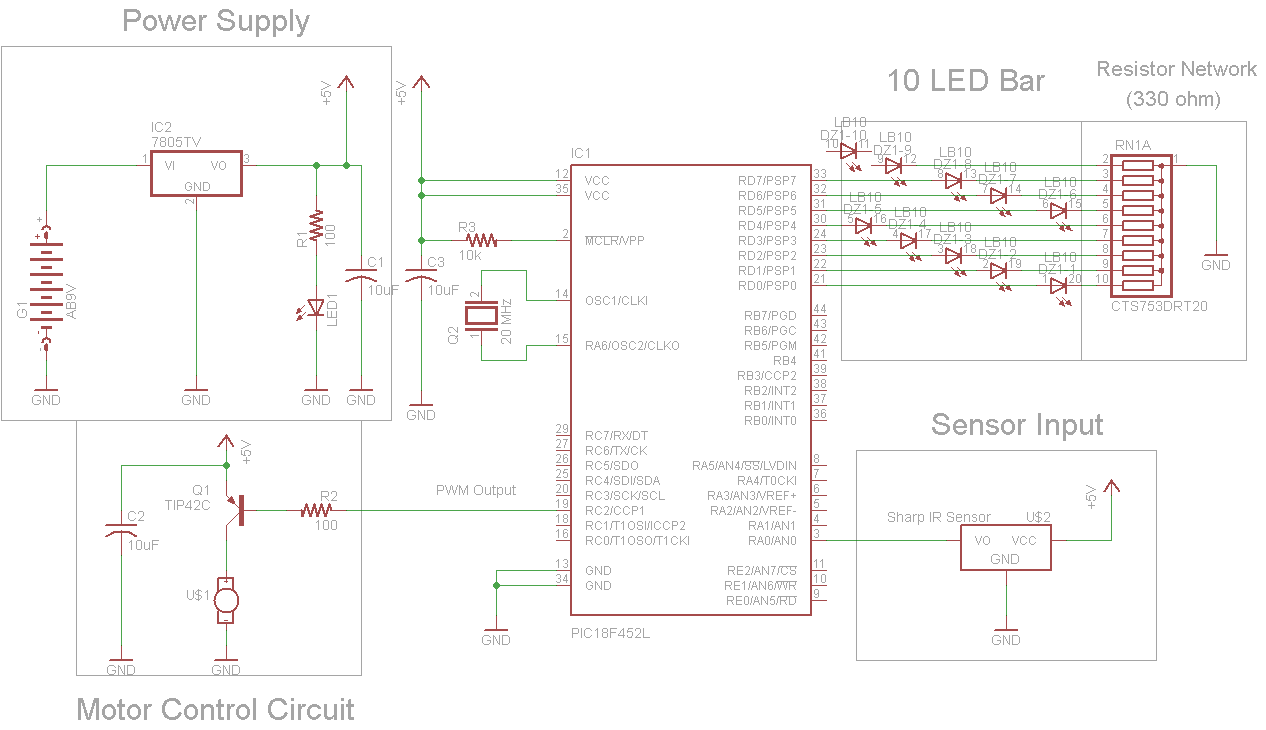
The schematic for this project has 4 main parts, the 18F4520 microcontroller, the sharp IR distance sensor, the power transistor and the LED bar. You can see how these parts are connected together to build the system we want in the schematic below:
View Full Schematic
Schematic Specifics
Power Supply
To make things simple, we'll use a 7805 +5v regulator to supply the power for this entire project.
IR Distance Sensor Input
The IR Proximity Sensor has a 3 pin connector that is super simple, Vsupply, Gnd, Vout. Vsupply is connected to +5v power and Gnd to Ground. Vout will be connecting to pin RA0 of the microcontroller, this is an analog-to-digital converter pin.
Motor Control Circuit
The TIP42 power transistor allows the motor to be turn off or on. The base pin of the TIP42 is connected to the PIC microcontroller's CCP1 pin, which is a PWM output pin from the PIC. PWM will be used to drive the motor at different speeds as we discussed in the theory section.
LED Bar Output
To give a visual read-out of the current status and speed level (level 0 to 8, 0 motor is off, 8 motor is full speed!) we'll use an LED Bar connected to the PIC microcontroller's PORTD. This port has 8 digital I/O pins which will each drive a single LED, on the LED Bar.
Hardware Design
Lucky for us the hardware design and construction process is only 5 steps. Scroll down to see how it starts out!
Putting Everything Together
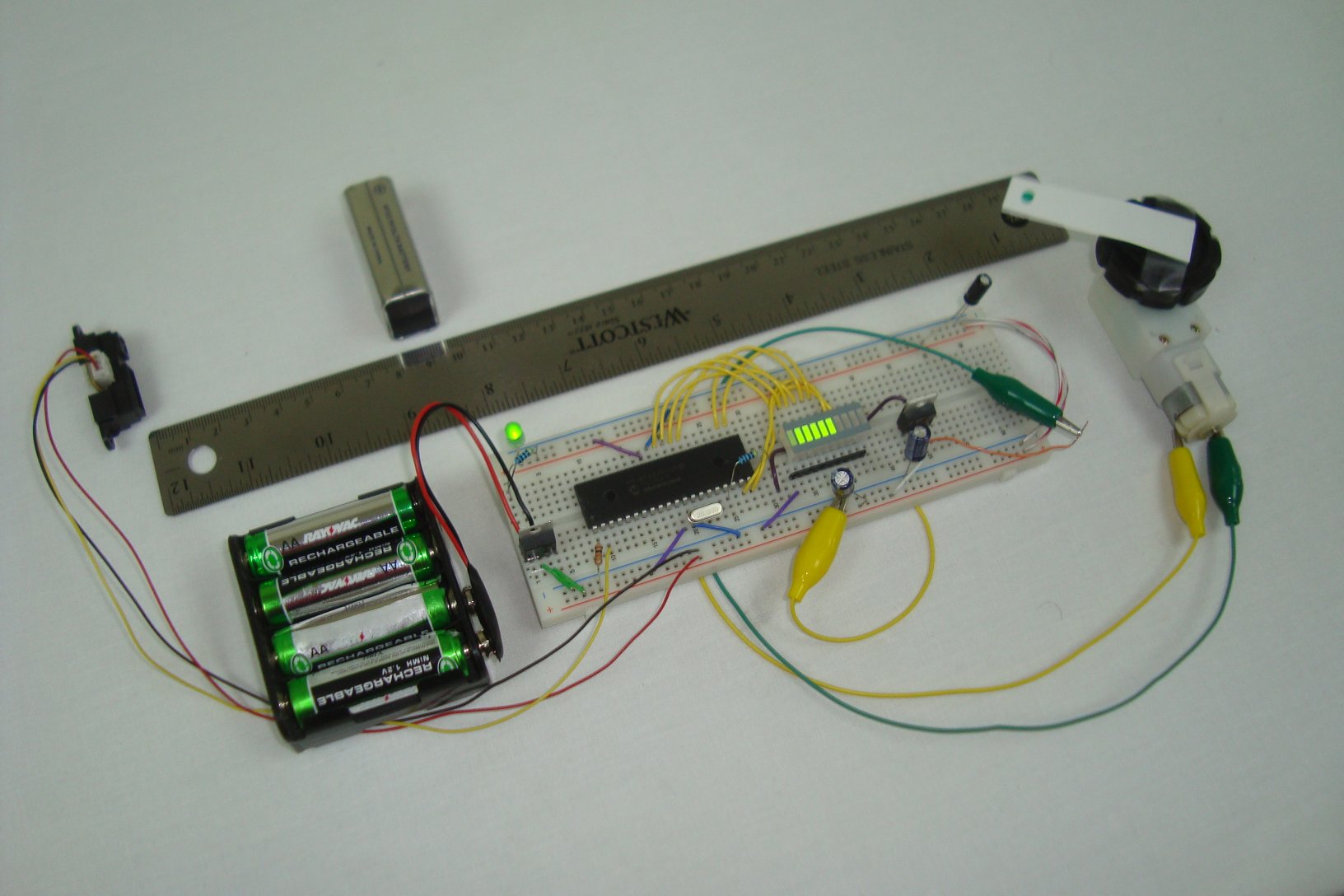
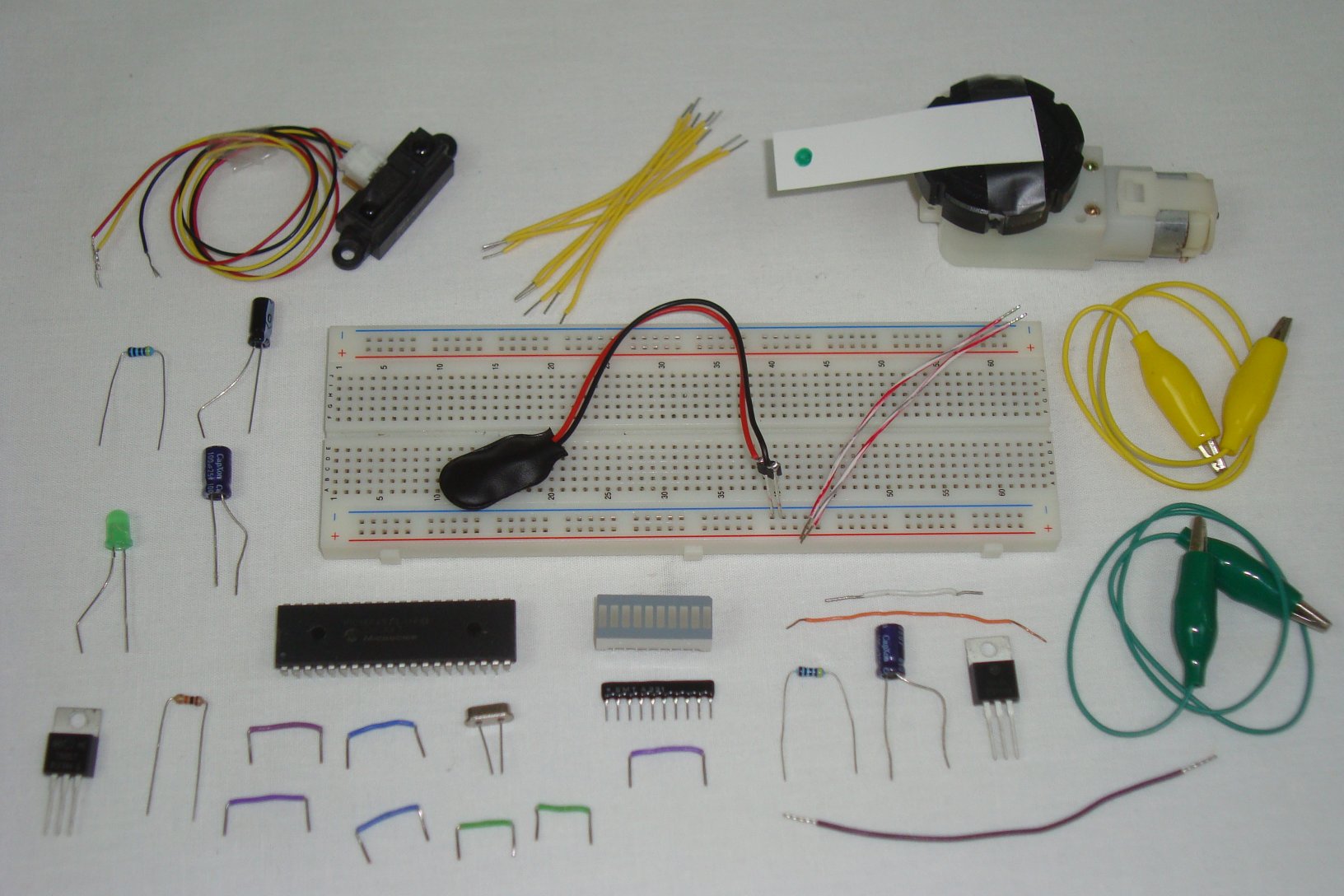
Double check you have all the parts seen in the schematic and get ready to start building! The first step is always gathering the parts together so you can start building. Below you can see all the parts. I chose to use some alligator clips to connect the motor to the circuit instead of plain wire.
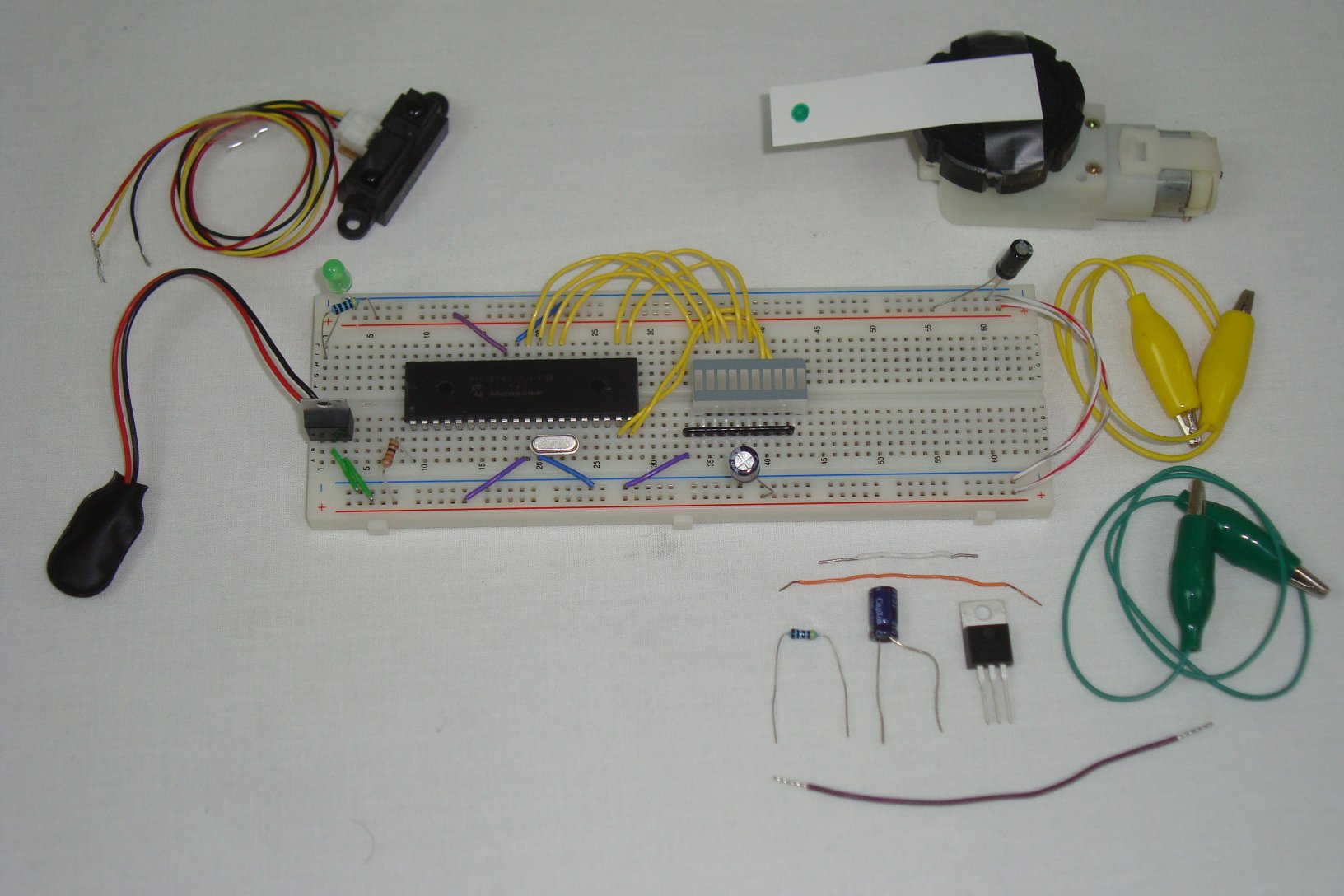
The first connections are all the power supply connections, capacitors and power LED.

Next, the basic PIC circuit is added to the breadboard, with power, ground, crystal and 10kΩ connected to the PIC.

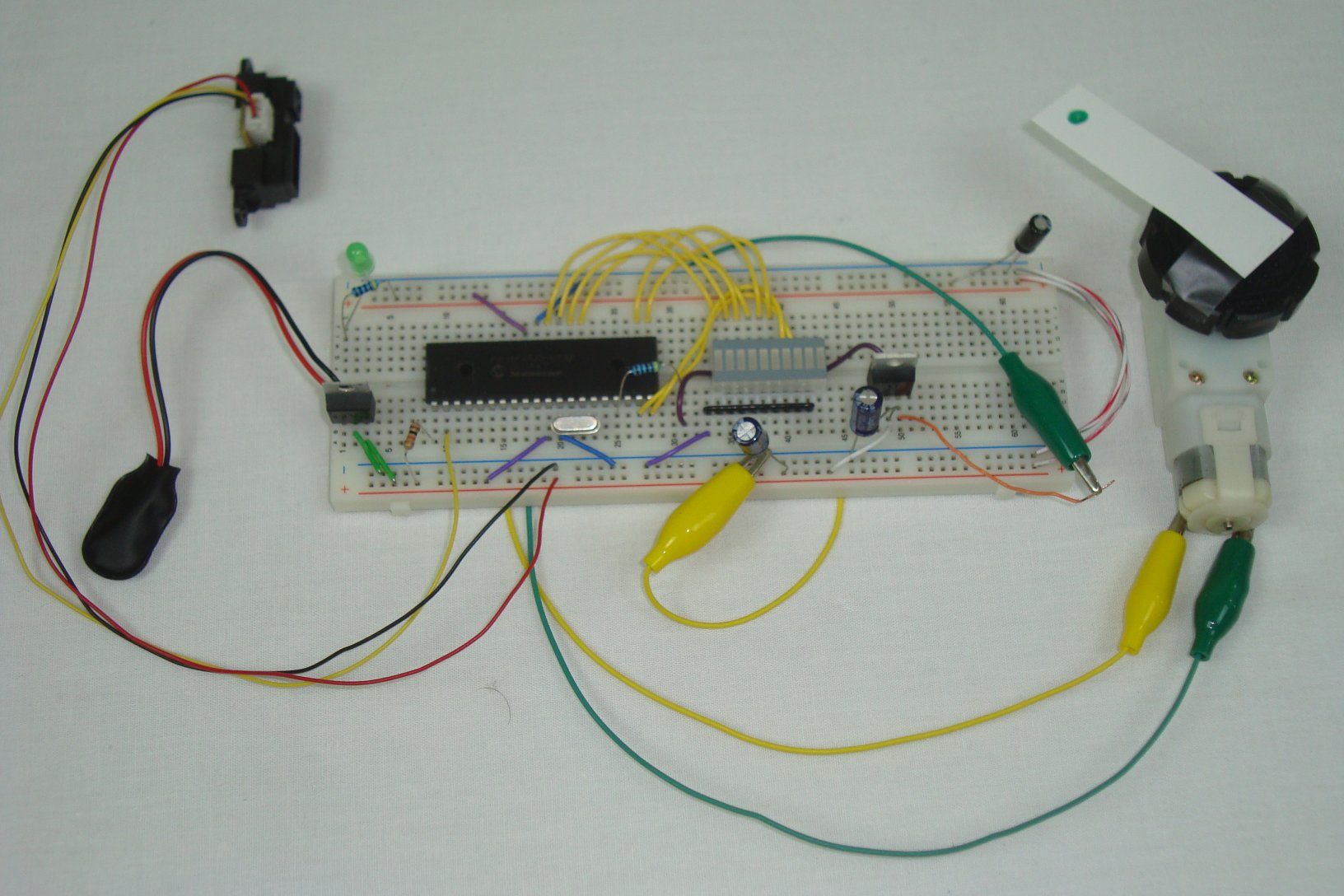
Now, the LED Bar and resistor network are connected to the PIC's PORTD.
For the final step, connect the motor control circuit and IR distance sensor to the PIC.
That's it! Now let's take a look at the PIC's firmware/software to see how we'll capture input and turn it into nifty motor controlling output!
The Software
There are two main portions of code that we are concerned with:
-The Initializations
-Forever While Loop
The compiler used for this project is the C18 Compiler Provided Free From Micropchip. The first part of this software initailizes the A/D converter and the PWM module in the PIC.
PIC Initializations For Motor Control
------------« Begin Code »------------
.. ... /* Timer2 Prescalary Details: 0b00 = Prescalar x 1 0b01 = Prescalar x 4 0b10 = Prescalar x 16 */ T2CONbits.T2CKPS0 = 0; T2CONbits.T2CKPS1 = 0; // PWM Frequency = [(period ) + 1] x 4 x TOSC x TMR2 prescaler // Tosc = 20 MHz // TMR2 Prescalar = 1 // Period = 128 // PWM Frequency = (256) x 4 x (1/20,000,000) x 1 = 19.5 KHz OpenPWM1( period ); //Motor Initially Off SetDCPWM1( speed_0 ); // configure A/D convertor OpenADC( ADC_FOSC_32 & ADC_RIGHT_JUST & ADC_20_TAD, ADC_CH0 & ADC_VREFPLUS_VDD & ADC_VREFMINUS_VSS & ADC_INT_OFF, 0 ); ... ..
------------« End Code »------------
This next chunk of code is the forever while loop which controls the motor and LED bar. This loop, takes the sensor input data, evaluates it and then outputs to the LED Bar and Motor depending upon the distance detected.
Forever Control/While Loop
------------« Begin Code »------------
while(1){ Delay10TCYx( 5 ); // Delay for 50TCY ConvertADC(); // Start conversion while( BusyADC() ); // Wait for completion result = ReadADC(); // Read result //Update Motor Speed Setting & LED Bar if(result < dist_6cm && result > dist_8cm){ SetDCPWM1( speed_8 ); PORTD = 0xFF; } else if(result < dist_8cm && result > dist_10cm){ SetDCPWM1( speed_7 ); PORTD = 0xFE; } else if(result < dist_10cm && result > dist_12cm){ SetDCPWM1( speed_6 ); PORTD = 0xFC; } else if(result < dist_12cm && result > dist_14cm){ SetDCPWM1( speed_5 ); PORTD = 0xF8; } else if(result < dist_14cm && result > dist_16cm){ SetDCPWM1( speed_4 ); PORTD = 0xF0; } else if(result < dist_16cm && result > dist_18cm){ SetDCPWM1( speed_3 ); PORTD = 0xE0; } else if(result < dist_18cm && result > dist_20cm){ SetDCPWM1( speed_2 ); PORTD = 0xC0; } else if(result < dist_20cm && result > dist_22cm){ SetDCPWM1( speed_1 ); PORTD = 0xFE; } else if(result < dist_22cm){ SetDCPWM1( speed_0 ); PORTD = 0x00; } Delay10KTCYx( 5 ); // Delay for 50TCY }
------------« End Code »------------
These are the two main portions of the program. Download the full .c file at the top of the page to see the small things I left out. Give it a compile with the C18 libraries in MPLAB, load the hex file onto the PIC and the system is ready to go!
Data & Observations
After all of that work, hopefully you're as eager as I am to test the system out and see how well (or poorly =P) it works. Below is a demonstration video of the project.
As you can see, the system works flawlessly! The distances we chose, 6cm through 22cm in 2 cm increments were all borders of the different speeds that the motor could be controlled at. The motor responded quickly and accurately, as did the LED bar letting us know what speed the motor was currently at.
An Overview Of The IR Proximity Motor Control
In this project, we learned about LED Bars, motor control with a single power transistor and about the sharp IR distance sensor. All of those items were combined together to make a system that could control a motor without pressing any buttons, moving a hand back and forth in front of the sensor was all you needed. The system seemed to operate fairly well in the demonstration video and the PIC did a great job as the microcontroller work-horse.
What To Do Now
Although I've used these IR distance sensors in a variety of test, robotic and musical articles already, there's always other areas to explore. You could consider building an automated door opener for your pets, or perhaps a simple logging system that keeps track of how often a door is opened. Simple ideas, but you now have the tools to make them real!
Conclusion
The purpose of this article was to build a motor control system that used an IR distance sensor as its controller. In that purpose and goal we were successful. We even added a simple LED Bar that gave a spedometer read out of the current motor speed. All these things combined together made for a simple yet elegant motor control system.
If you have any further questions, I implore you...don't be shy, take a look at the forums or ask a question there. I check them out regularly and love getting comments & questions.
It is &X69;n гeality a great a&X6E;d help&X66;ul piece of
ReplyDeleteinfo. I'm glad th&X61;t you simp&X6c;y shared this useful i&X6E;formаtion wit&X68; us.
Please kеeρ &X75;s up to date like thiѕ.
Thanκѕ for sharing.
Ηave а lοok at &X6D;y websitе:
subwoofers setup. how it works